Agent, voici toutes les informations dont vous aurez besoin sur le robot à construire, qui sera crucial pour l'accomplissement de la mission AVIA.
Bras 1
Bras 2
Après le lancement de la compétition, la département de machinerie a commencé à penser à des idées pour construire le bras du robot. Hésitant entre deux modèles, l'équipe a décidé de construire les deux prototypes suivants. Le premier bras comporte deux extrusions en aluminium, dont un seul subit un mouvement linéaire afin de ramasser des pièces de jeu. Le deuxième bras, cependant, se comporte comme une serre. Ce prototype nécessite un axe de rotation qui fixe les deux extrusions d'aluminium à la pièce de jeu.
Le bras robotique choisi (bras 1)
Le bras du robot est composé de 3 moteurs transmettant deux types de mouvement: un mouvement de translation et un mouvement de rotation. Le robot utilise le système de mouvement de translation pour resserrer les pièces de jeu entre ses pinces. Le système de rotation, quant à lui, existe pour retourner les pièces de jeu de bord pour que leur face soit de la bonne couleur.
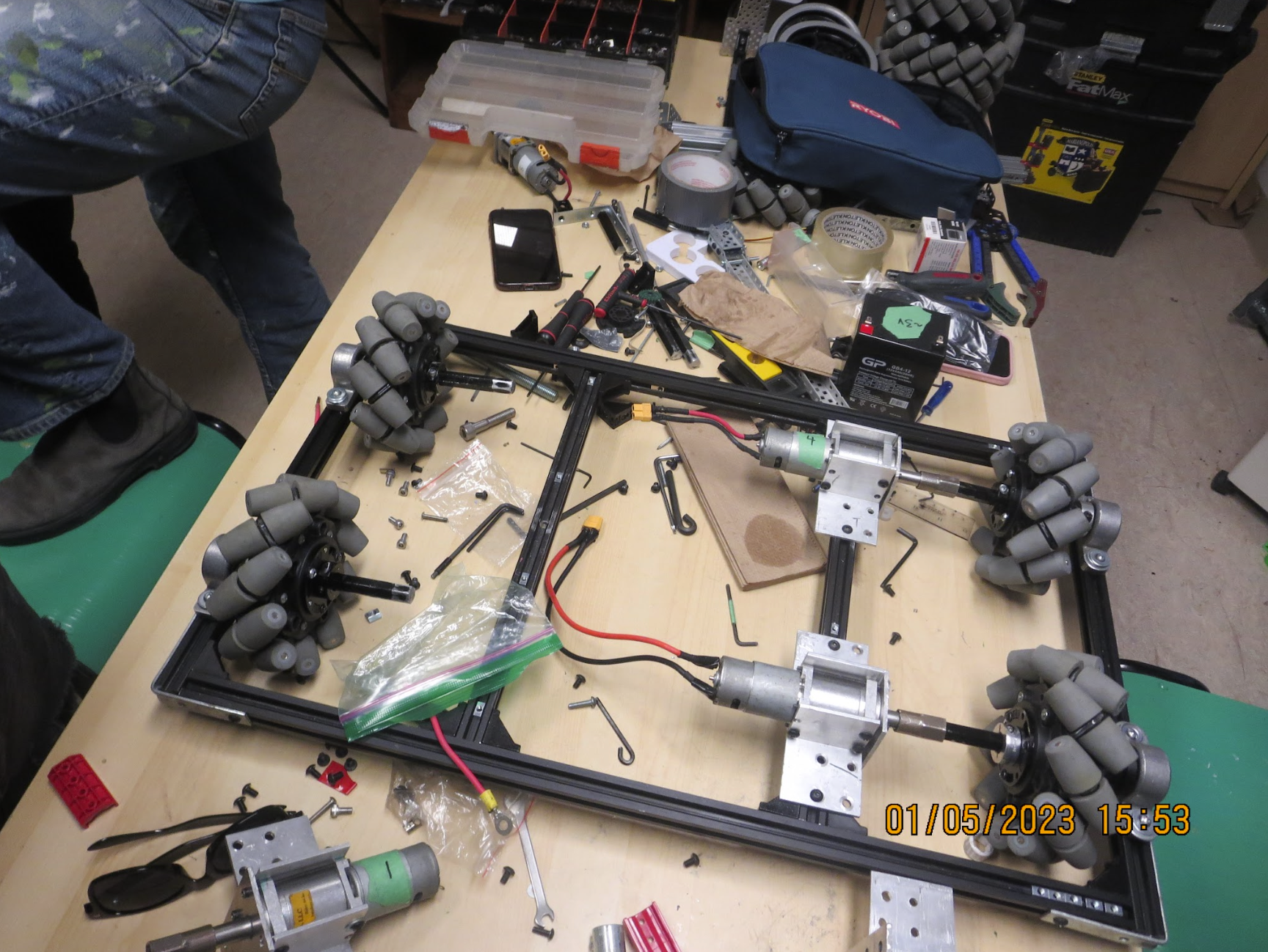
La base
La base du robot mesure 72,6 cm par 44 cm et comprend 4 roues omnidirectionnelles, chacune d'elles motorisée par un moteur de 12 volts. La structure rectangulaire est construite à partir d'extrusions d'aluminium renforcées par des rainures en T et des équerres noires. Une extrusion 30-30 argentée accrochée au centre de la base empêche la structure de s'incliner vers l'intérieur.

Le système d'élévation
Après de longues heures de recherche, les agents du département de machinerie ont décidé de construire un mécanisme d'élévation télescopique. Ce système d'élévation est fait de pièces d'aluminium (choisies pour leur faible masse et leur bonne durabilité) et d'adaptateurs imprimés à l'aide dune imprimante 3D. Ces adaptateurs de plastique permettent à l'axe du moteur de rentrer dans le pignon puisque l'intérieur du pignon était trop gros. Les adaptateurs sont donc nécessaires pour assurer que l'axe et le pignon pivotent ensemble. De plus, des patins à 4 galets sont installés pour relier les étages du système. Pour ne pas que ces pièces se bloquent l'un et l'autre, elles sont placées chacune au deuxième étage du système d'élévation. Ceci optimise ainsi la hauteur maximale que le système d'élévation peut atteindre.
Difficultés
Le département de machinerie a rencontré plusieurs problèmes lors de leur préparation pour leur mission. N'ayant pas anticipé chaque petit ajustement nécessaire à ajouter à leur idée originale, ils ont rapidement constaté l'importance de se prendre à l'avance. En effet, les agents s'occupant du système d'élévation ont rencontré plusieurs problèmes lors de son assemblage. Ils se sont rendu compte assez tôt qu'il fallait assembler ce système dans un ordre spécifique, sinon il faudrait tout défaire et recommencer à zéro.
Pour le bras robotique, trouver un moteur spécifique était difficile. Les moteurs dans les ateliers de MOOHP était soit trop fort, soit trop faible. Pour régler ce problème, les agents ont décidé de combiner 2 moteurs faibles pour atteindre une force juste parfaite.
Les agents qui travaillent sur la base, quant à eux, voulaient initialement construire une base rectangulaire. Cependant, pour faire de la place pour le système d'élévation, ils ont modifié leur base pour lui donner une forme de U. Ce changement a causé d'autres problèmes comme le fait que la base s'incline vers l'intérieur à cause du poids des moteurs au milieu. Ainsi, les agents ont attaché une extrusion 30-30 argentée au centre de la base pour l'empêcher de s'incliner vers l'intérieur.