Agent, here is all the information you will need on the robot to build — it will be crucial towards the completion of mission AVIA.
Arm 1
Arm 2
Following the kickoff, the machinist division began brainstorming ideas for the arm of the robot. Conflicted between two models, they build the two following prototypes. The first arm has two aluminium extrusions, only one of which undergoes linear motion in order to pick up game pieces. The second arm, however, behaves like a claw. This prototype requires an axis of rotation that will clamp both aluminium extrusions to the game piece.
The Chosen Arm (Arm 1)
The arm of the robot is composed of 3 motors that ensure two motion systems: linear motion and rotation. The horizontal linear motion is necessary for picking up and dropping game pieces, whilst the rotation of the arm allows the coloured face corresponding to agents' team to face upwards.
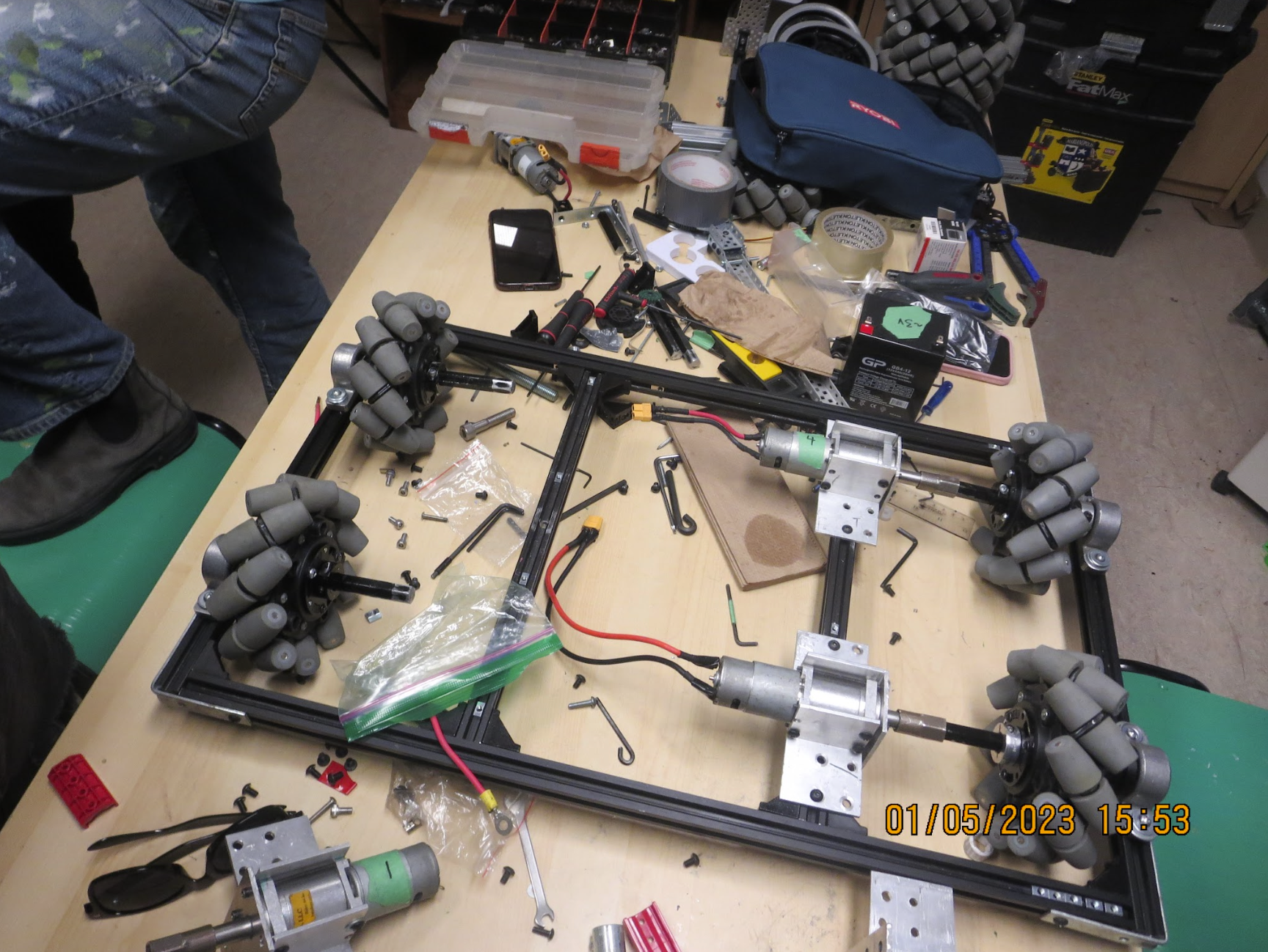
The Base
The 72.6 cm x 44 cm base of the robot consists of 4 omni wheels, motorized individually by four 12 volt DC motors. The rectangular structure is built from multiple aluminium extrusions fortified with t-slots and black brackets. A 30-30 silver extrusion is attached at the center of the base to avoid slanting inwards.

The Lift
After careful research, the Machinery agents determined that a three stage cascading lift would be the best option to build a mechanism capable of both reaching great heights as well as retracting itself, creating a cascading motion. The lift is constructed using aluminum extrusions, chosen for their lightweight and durable nature, and 3D-printed adapters to allow the extrusions to lift. These 3D-printed parts allow the motor axle to fit into the sprocket, as the sprocket's interior was too large to accommodate the axle. The adapters are therefore necessary to ensure that the two rotate together. The rollers, however, must be strategically placed so as three of the four faces of an extrusion are free of any obstacles. In order to achieve a maximum height, after multiple designs, agents deem it optimal to attach the rollers to the second stage, and allow them to roll freely on the first and third stage.
Struggles
The Machinery Division encountered many challenges as they prepared for the mission. Having not anticipated how many small adjustments would be necessary to their original design, they quickly learnt of the importance of leaving time for testing. Agents working on the lift faced many issues during its assembly due to its tedious nature; building it in a specific order was vital, otherwise the lift would have to be disassembled altogether.
For the arm, finding an appropriate motor strength became difficult, with the given motors being either too weak or too strong. To resolve this issue, the agents decide to combine 2 weak motors in order to provide the strength necessary.
Agents working on the base originally designed a rectangular base for the robot. However, after struggling to arrange space for the lift, they modified the design to a U-shaped base. This change resulted in further problems; due to the weight of the 4 motor, the base would incline itself towards the robot's center. Therefore, they added a thick 30-30 aluminium extrusion to the base to support its center.